Sim2Real Autonomous Driving using Convolutional Neural Network for Urban Environments
CAMEL: Learning Cost-map made easy for Off-road driving
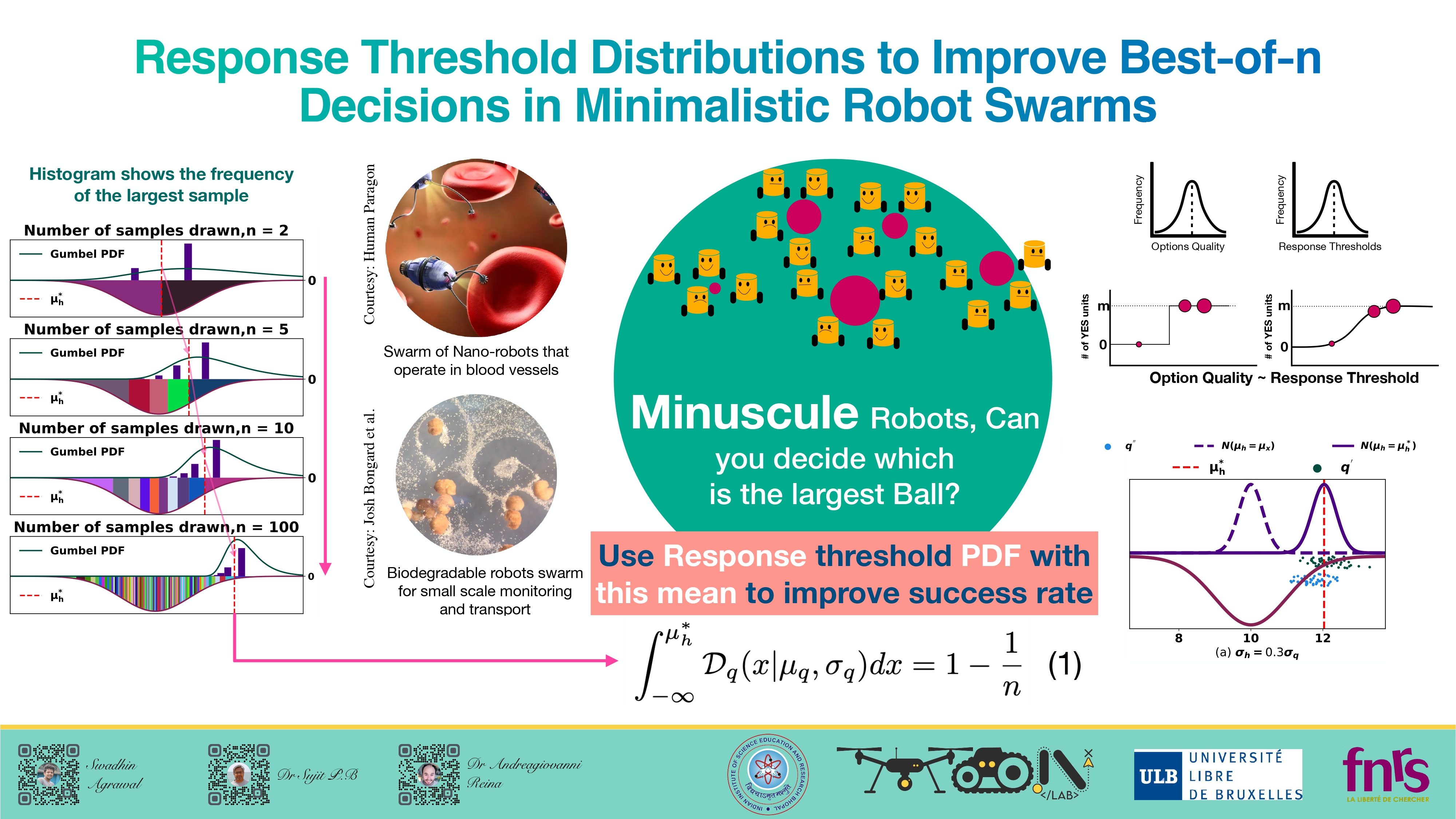
Response Threshold Distributions to Improve Best-of-N Decisions in Minimalistic Robot Swarms
OFFSEG: A Semantic Segmentation Framework For Off-Road Driving
Finite-Time Cooperative Stand-Off Target Tracking in the Presence of Wind.
A Lyapunov Vector Field-Based Guidance for Cooperative Standoff Target Tracking with Collision Avoidance
Multi-Agent Deep Reinforcement Learning For Persistent Monitoring With Sensing, Communication, and Localization Constraints
A COLREGs-Compliant Conflict Resolution Strategy for Autonomous Surface Vehicles
OAS-GPUCB: On-the-way Adaptive Sampling Using GPUCB for Bathymetry Mapping
Deep Reinforcement Learning-Based Approach for a Single Vehicle Persistent Monitoring Problem with Fuel Constraints